


12V 60 RPM Side Shaft High Torque Motor (Original & new)
Original price was: ₹549.00.₹439.00Current price is: ₹439.00.
Description
This 12V 60 RPM Side Shaft High Torque Motor is designed for applications requiring low-speed, high-torque performance. The side shaft configuration is ideal for mounting in tight spaces while delivering powerful output. Its robust construction ensures reliability and longevity in various applications, from robotics to industrial systems.
Key Features:
High Torque: Capable of handling heavy loads with ease.
Low Speed: 60 RPM provides precise control in motion.
Side Shaft Design: Ideal for compact installations and easy integration.
Durable Construction: Built for continuous and demanding operations
Applications:
Robotics: Ideal for driving heavy-duty robotic mechanisms.
Automation Systems: Suitable for slow, controlled movements in machinery.
DIY Projects: Great for hobbyists requiring powerful motor control.
Industrial Equipment: Used in systems where high torque is crucial for operation.
Technical Details
- Operating Voltage: 12V DC
- Motor body length: 75mm
- Motor Body Diameter: 35mm
- Material: Cast Iron
- Shaft diameter: 6mm
- Voltage – 3v to 12v
- RPM – 60 (at 12v)
- Nominal Voltage – 12v
- No- Load Current – 20mA
- Full Load Current – 800mA
- Full (Stall) Load Torque – 14 kgcm
Integration with Arduino

Sample Code
| //https://kitsguru.myshopify.com/products/dc-geared-motor-10rpm | |
| int enA = 10; | |
| int in1 = 9; | |
| int in2 = 8; | |
| // motor two | |
| int enB = 5; | |
| int in3 = 7; | |
| int in4 = 6; | |
| void setup() | |
| { | |
| // set all the motor control pins to outputs | |
| pinMode(enA, OUTPUT); | |
| pinMode(enB, OUTPUT); | |
| pinMode(in1, OUTPUT); | |
| pinMode(in2, OUTPUT); | |
| pinMode(in3, OUTPUT); | |
| pinMode(in4, OUTPUT); | |
| } | |
| void demoOne() | |
| { | |
| // this function will run the motors in both directions at a fixed speed | |
| // turn on motor A | |
| digitalWrite(in1, HIGH); | |
| digitalWrite(in2, LOW); | |
| analogWrite(enA, 200);// set speed to 200 out of possible range 0~255 | |
| digitalWrite(in3, HIGH);// turn on motor B | |
| digitalWrite(in4, LOW); | |
| analogWrite(enB, 200); // set speed to 200 out of possible range 0~255 | |
| delay(2000); | |
| digitalWrite(in1, LOW);// now change motor directions | |
| digitalWrite(in2, HIGH); | |
| digitalWrite(in3, LOW); | |
| digitalWrite(in4, HIGH); | |
| delay(2000); | |
| // now turn off motors | |
| digitalWrite(in1, LOW); | |
| digitalWrite(in2, LOW); | |
| digitalWrite(in3, LOW); | |
| digitalWrite(in4, LOW); | |
| } | |
| void demoTwo() | |
| { | |
| // this function will run the motors across the range of possible speeds | |
| // note that maximum speed is determined by the motor itself and the operating voltage | |
| // the PWM values sent by analogWrite() are fractions of the maximum speed possible | |
| // by your hardware | |
| // turn on motors | |
| digitalWrite(in1, LOW); | |
| digitalWrite(in2, HIGH); | |
| digitalWrite(in3, LOW); | |
| digitalWrite(in4, HIGH); | |
| // accelerate from zero to maximum speed | |
| for (int i = 0; i < 256; i++) | |
| { | |
| analogWrite(enA, i); | |
| analogWrite(enB, i); | |
| deLay(20); | |
| } | |
| // decelerate from maximum speed to zero | |
| for (int i = 255; i >= 0; –i) | |
| { | |
| analogWrite(enA, i); | |
| analogWrite(enB, i); | |
| delay(20); | |
| } | |
| // now turn off motors | |
| digitalWrite(in1, LOW); | |
| digitalWrite(in2, LOW); | |
| digitalWrite(in3, LOW); | |
| digitalWrite(in4, LOW); | |
| } | |
| void loop() | |
| { | |
| demoOne(); | |
| delay(1000); | |
| demoTwo(); | |
| Delay(1000); | |
| } |
Package Includes
- 1 x 12V 60 RPM Side Shaft High Torque Motor (Original & new)
Related products

300 RPM BO Motor-Straight
Original price was: ₹68.00.₹50.00Current price is: ₹50.00. 100 RPM BO Motor – Straight
Original price was: ₹99.00.₹55.00Current price is: ₹55.00.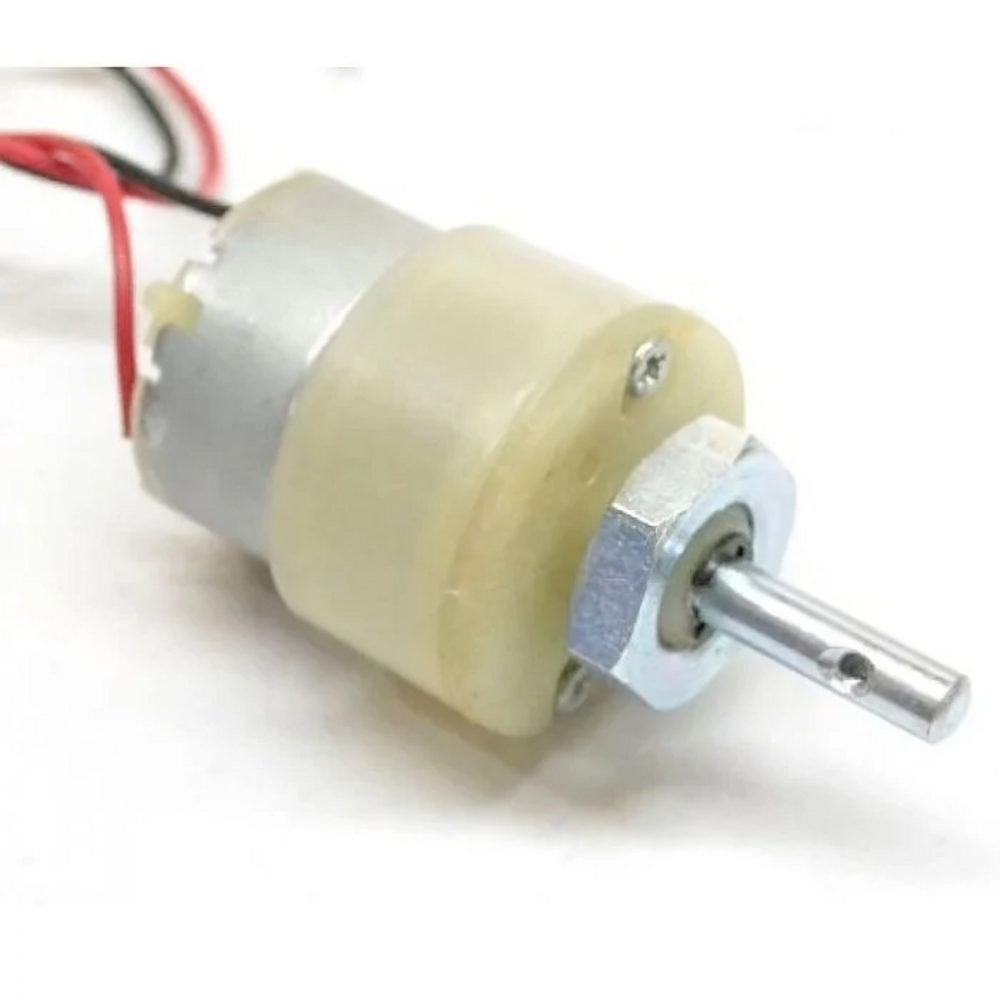
DC Motor – 60RPM – 12Volts
Original price was: ₹199.00.₹145.00Current price is: ₹145.00.
Micro 130 Small DC Motor 3V-6V
Original price was: ₹35.00.₹15.00Current price is: ₹15.00.We specialize in providing DIY electronics kits and components, empowering makers and hobbyists to build innovative projects. We also develop final year projects for engineering students, delivering hands-on solutions for academic excellence.